


自動化立體倉庫:穿梭車與堆垛機的功能定位及配合使用指南
返回上層簡單來說,穿梭車(RGV/AGV)主要負責貨架內部或水平方向的貨物移動,是 “貨架內的搬運工”;堆垛機則專注于垂直方向的貨物存取,是 “貨架間的升降梯”,二者常配合使用,但功能定位完全不同。
一、核心功能與作業范圍
這是兩者根本的區別,決定了它們在倉庫中的角色。
穿梭車:
作業范圍限于同一層貨架內部,或倉庫內的水平搬運路徑。
核心功能是在指定層貨架上,將貨物從入庫口搬運到指定貨位,或從貨位搬運到出庫口。
無法實現垂直方向的升降,只能在同一平面內移動。
堆垛機:
作業范圍覆蓋整個巷道的所有層貨架,可實現 “水平 + 垂直” 雙向移動。
核心功能是從巷道口的輸送線取貨,升降到指定層高,再水平移動到目標貨位存貨(反之亦然)。
垂直升降是其核心能力,升降高度可匹配 40 米以上的高層貨架。
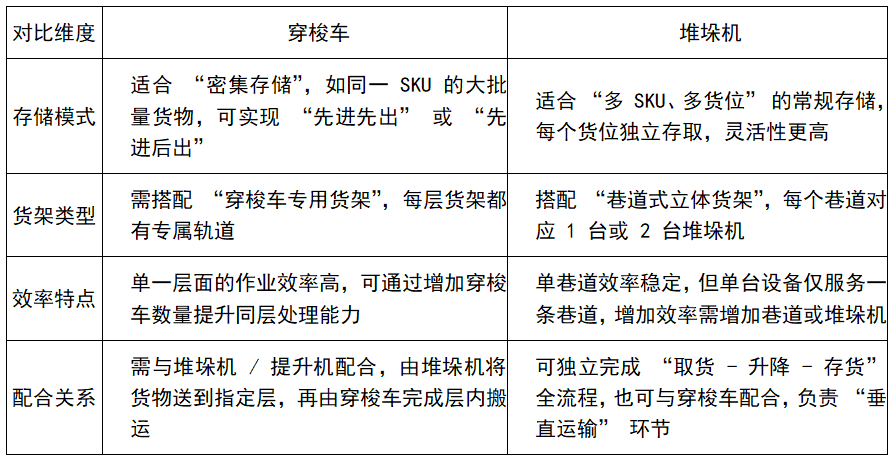
二、適用場景與配合模式
兩者的適用場景互補,常根據倉庫的存儲需求組合使用。
三、結構與移動方式
硬件結構的差異直接決定了它們的移動能力和作業限制。
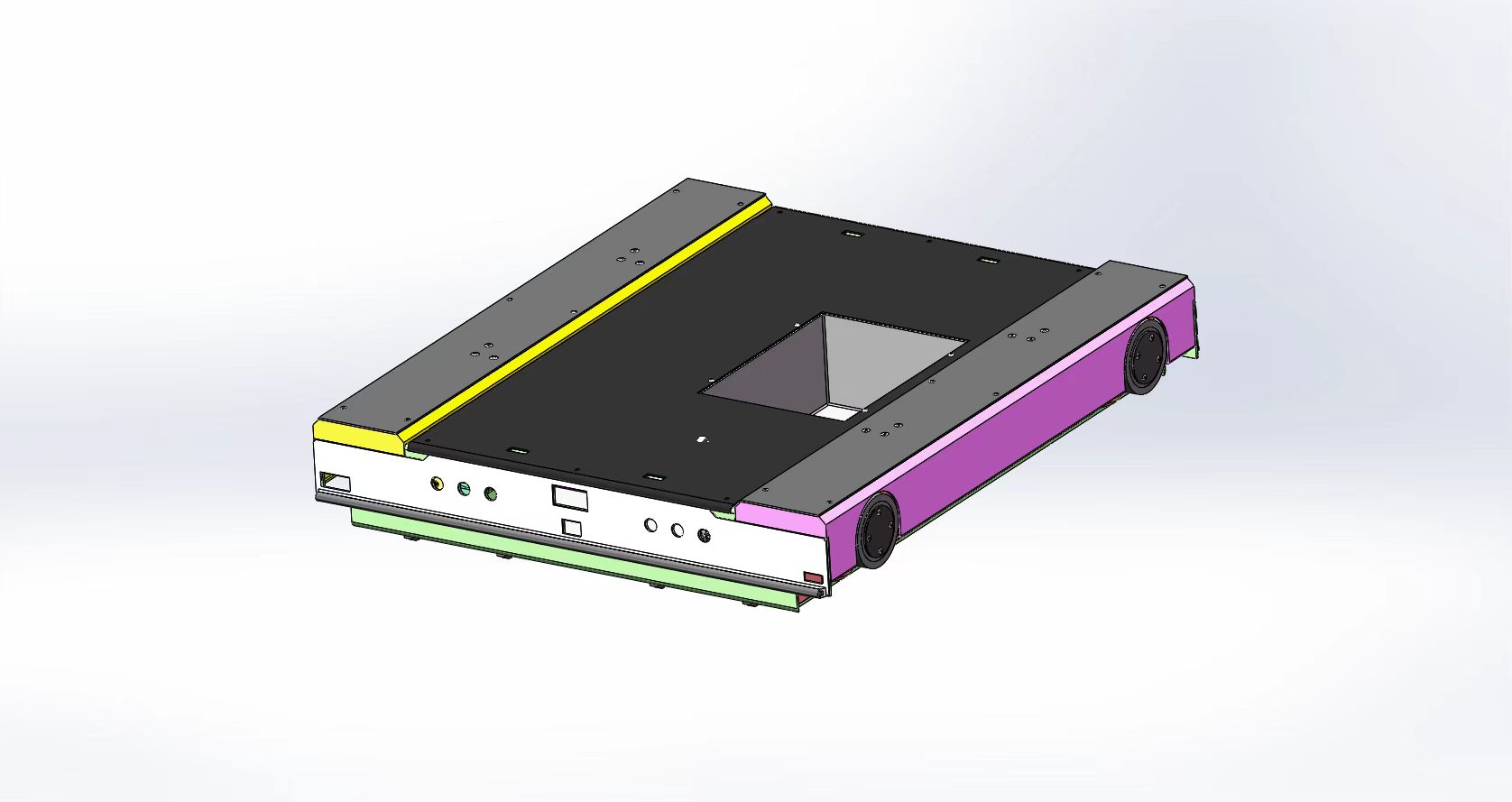
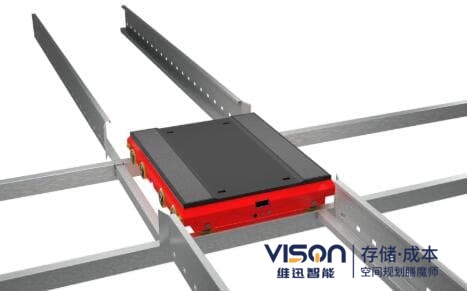
穿梭車:
結構緊湊,體積較小,底部有車輪或導向輪,沿預設軌道(RGV)或激光導航路徑(AGV)移動。
無需復雜的升降機構,僅靠電機驅動水平移動,制造成本相對較低。
堆垛機:
結構復雜,包含立柱、升降臺、貨叉、運行機構(水平)和起升機構(垂直),體積較大。
沿巷道兩側的軌道運行,通過鋼絲繩或鏈條驅動升降臺,技術復雜度和制造成本更高。
- ← 上一條: 四向穿梭車立體庫:貨架設計的核心邏輯與適配要點
- 下一條 →: 從人工到自動,從平面到立體:立體貨架的進化與倉儲行業的蛻變




 蘇公網安備 32011402011930
蘇公網安備 32011402011930